China-developed world’s first fully autonomous humanoid tennis robot draws repost, like from Elon Musk
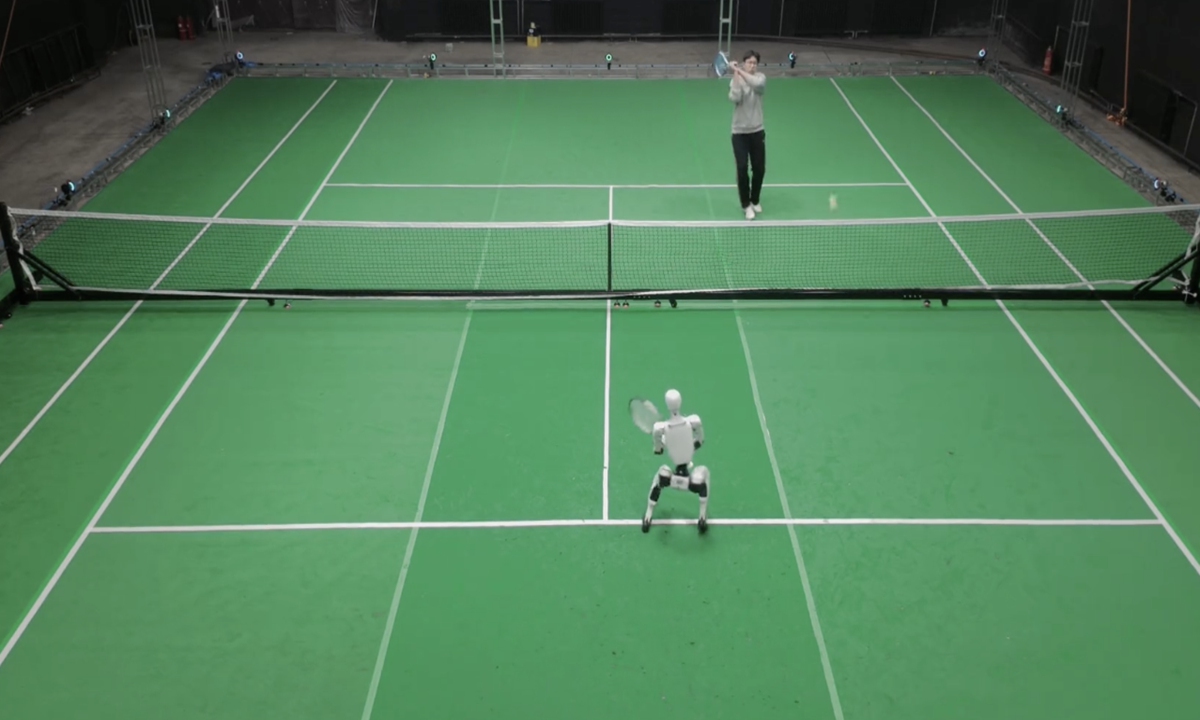
A humanoid tennis robot developed by Beijing-based Galbot is seen demonstrating autonomous rallying capability, marking a leap from handling single shots to mastering full-match dynamics, according to a company statement sent to the Global Times on March 17, 2026. Photo: Courtesy of Galbot
A robotics team from Beijing has developed the world's first fully autonomous humanoid tennis robot, drawing a repost and like from Elon Musk on X. The breakthrough marks a leap from handling single shots to mastering full-match dynamics, signaling a shift from machine-assisted play to the emergence of a genuine on-court "opponent," according to media reports.
A video of a China-developed humanoid robot playing tennis was posted on X on Sunday and was reposted and liked by Elon Musk on Monday with a brief comment "yeah," drawing a total of 8,600 likes and sparking widespread attention and discussion.
The humanoid tennis robot, developed by Galbot, can rapidly adjust its footwork and positioning, coordinate upper- and lower-body movements to execute swings, and return shots with precision to designated targets, as the video shows. It can continuously adapt its posture and timing to handle a variety of incoming balls, enabling sustained multi-shot rallies with players of different skill levels, according to a statement from Galbot.
In a highly dynamic and adversarial sport like tennis, the robot is capable of responding to balls traveling at high speeds, unpredictable trajectories and constantly changing rhythms of play, demonstrating advanced real-time perception, control and decision-making capabilities, the statement said.
More importantly, the capability is not driven by pre-programmed motions but is autonomously acquired through deep reinforcement learning, marking the world's first realization of high-dynamic tennis rallying through a humanoid robot. The breakthrough represents a fundamental shift from "mechanical motion replication" to "intelligent, decision-driven response," per the statement.
Tennis is widely regarded as one of the most demanding tests for humanoid robots. Galbot has developed the world's first full-body, real-time intelligent control algorithm tailored for tennis play, enabling rapid response and stable posture under high-speed conditions. During multi-minute rallies, the robot can move across a full-sized court, make autonomous decisions and deliver precise shots. It performs with composure against opponents of different ages and playing styles, handling both single-shot returns and full-court control with ease, a Galbot employee told the Global Times.
The company has also introduced a new research framework, LATENT, a novel robot motor-learning approach that enables humanoid robots to acquire complex movement skills from imperfect human motion data. The method allows the robot to execute highly dynamic and agile tennis strokes and sustain real-world rallies, further advancing the frontier of embodied intelligence, according to Galbot.
Chinese experts said that the breakthrough shows that embodied artificial intelligence is entering real-world validation in highly dynamic scenarios, with tennis serving as a benchmark for general-purpose humanoid intelligence. It's a shift from motion replication to decision-driven systems integrating perception, planning and control, they said.
Liu Dingding, a Beijing-based internet analyst, told the Global Times on Tuesday that the advance suggests humanoid robots have the potential to move into households and sectors such as industry, agriculture and manufacturing as they gain the ability to handle complex, scenario-based tasks.
"This is a major breakthrough for robotics as well as China's manufacturing and tech capabilities," he said.
He added that the spillover effects could be significant, as advances in dynamic control and learning from imperfect data may lower training costs and improve scalability, accelerating applications in industrial, automation and services scenarios.
RELATED ARTICLES