Chinese research team develops ‘flying hand’ robot, light as a water bottle, dexterous enough to pinch tissue
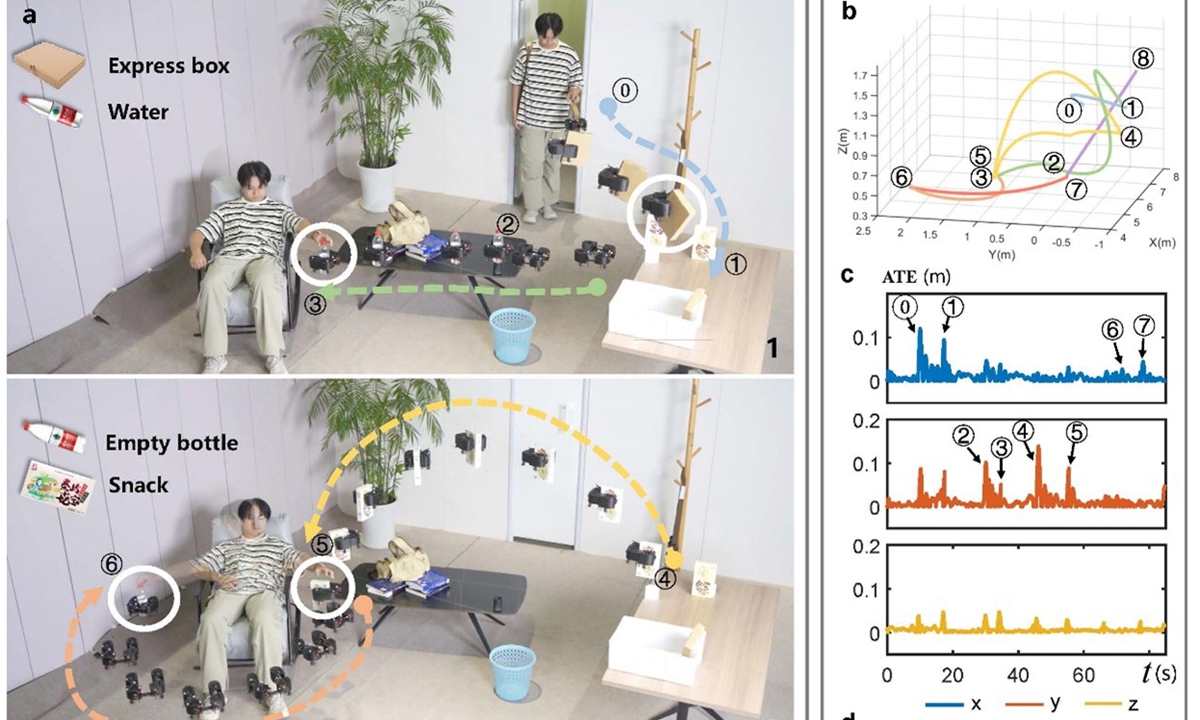
In a simulated home environment, HI-ARM successively completes actions such as fetching a delivery, handing over water, collecting an empty bottle, and hanging a clothes hanger—all without human intervention. Photo: Zhejiang University
Inspired by birds which can fly with their wings and skillfully perch with their talons, a research team from Zhejiang University designed the world's first hand-shaped flying manipulation robot, according to Zhejiang University on Tuesday.The achievement was published online in the international journal Nature Communications on January 30.
The robot, named as Hand-like compact Aerial Robot for Manipulation (HI-ARM), abandoned the past structure of flying system plus a robot arm, but effectively combined the two functions in the robot. The robot, capable of flying, features a C-shaped open grasping contour that mimics the motion of a palm, a 5-degree-of-freedom finger structure combining extension and twisting mechanisms.
The HI-ARM is capable of holding a water bottle in its "palm" to delicately pinching a tissue with its "fingertips"—all while weighing only 556 grams, equivalent to a bottle of water.
The robot can adaptively conform to surfaces without prior knowledge of the object's shape—whether it's a regular water bottle, irregular alphabet blocks, or soft fabric. Upon contact, it coordinately adjusts its five degrees of freedom to achieve stable grasping. The distance error is within 3 centimeters.
In a simulated home environment, HI-ARM successively completed actions such as fetching a delivery box, handing over water, collecting an empty bottle, and hanging a clothes hanger—all without human intervention. When facing different objects, the robot autonomously switches its grasping modes - when grasping a 75-gram express delivery box, it gently pinches it with its fingertips; when grasping a 134-gram water bottle, it switches to wrapping it in the palm of its hand
The robot also can deform and grasp in real-time during flight, much like the instinctive human reaction of reaching out to grab something—requiring no complex computation yet capable of responding to unexpected interactions in chaotic environments, according to the university.
To examine its practical potential, the research team conducted a series of tests in real outdoor settings: HI-ARM contracted and deformed to pass through a narrow rock crevice only 22 centimeter wide. When passing on a cup across a river, it maintained smooth trajectory despite the turbulent flow.
The significance of this research lies in that it has overcome the fundamental contradiction among size, weight and function of traditional flight operation platforms. Its lightweight
The lightweight design of 556 grams enables the robot to operate in space-constrained scenarios, such as homes and factories, while the multi-modal adaptive grasping ability enhances its application possibility in unknown environments, according to the university.
The university described this bio-integrated design as transforming from "flying eyes" into "flying hands," and can be applied to disaster rescue, in-home assistance, and field operations.
Global Times
RELATED ARTICLES